机器人小臂结构再设计


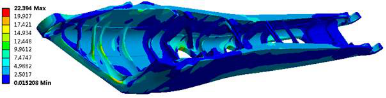
采用精铸铝合金结构代替钢板焊接结构,基于对结构强度/刚度的要求而改变各部位材料厚度及加强筋结构形式,小臂质量由79.9Kg减小到43Kg,减重达46%,在结构静强度指标上,再设计结构强度的安全系数分别比原始结构有较大幅度的提高,静刚度与固有频率比原始结构有提升,从而有助于提高系统稳定性、减小定位时的超调量、缩短达到稳定状态的时间等关键性能指标,提升机器人的使用性能。与机器人大臂一样,摒弃了所有容易产生失效问题的焊接部位,整个小臂结构在长期运行条件下的可靠性将会得到极大的提高。
经过再设计的机器人手臂,重量减少了很多,操控精度、稳定性和可靠性得到了极大的提升,使得整个机器人的动作更加灵巧、精准,同时,减重后电机的驱动功率要求更低,这样成本和能耗也更低了,可以在更多的领域发挥作用。这就是再设计的魅力,为任何一个工业品的质量提升和创新打开了一扇巨大的窗户。
<上一页 1 2 3















